2.3節 正多面体
著者:梅谷 武
語句:正多面体, 対称変換群, 合同変換群の有限部分群
語句:正多面体, 対称変換群, 合同変換群の有限部分群
正多面体の対称変換群を決定し、正四面体・立方体の対称変換群を群論的作図法で可視化する。
作成:2010-01-18
更新:2021-07-01
更新:2021-07-01
前節の議論により、正多面体の対称変換群は直交群の有限部分群であり、対称群に埋め込むことができます。ここでは五種類の正多面体の内、正四面体と立方体の対称変換群の構造を決定し、それを視覚的に示します。
正四面体の対称変換で回転で表現できるものは、重心と頂点を結ぶ4本の軸に関する回転と二組の頂点対に関する互換の積です。これらは位数12の群を成し、交代群A4と同型になります。そのすべてを図示します。
package.path = "std/?.lua"
require( "Geometry" )
a = math.sqrt( 6.0 ) / 2.0
b = math.sqrt( 3.0 ) / 3.0
c = math.sqrt( 6.0 ) / 6.0
d = 2.0 * b
vertices = {
0.0, a, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0,
-1.0, -c, -b, 0.0, 1.0, 0.0, 0.0, 0.0,
1.0, -c, -b, 0.0, 1.0, 0.0, 0.0, 0.0,
0.0, -c, d, 0.0, 1.0, 0.0, 0.0, 0.0
}
function tetrahedron()
dxSetRenderState( D3DRS_CULLMODE, D3DCULL_NONE )
dxSetColorHSV( 0.0, 1.0, 1.0 )
dxTriangleMesh( 4, vertices, 1, { 0, 1, 2 } )
dxSetColorHSV( 90.0, 1.0, 1.0 )
dxTriangleMesh( 4, vertices, 1, { 0, 2, 3 } )
dxSetColorHSV( 180.0, 1.0, 1.0 )
dxTriangleMesh( 4, vertices, 1, { 0, 3, 1 } )
dxSetColorHSV( 270.0, 1.0, 1.0 )
dxTriangleMesh( 4, vertices, 1, { 1, 3, 2 } )
dxPrint( 0.0+0.1, a+0.1, 0.0+0.1, 1.0, 1.0, 1.0, "1" )
dxPrint(-1.0-0.1, -c-0.1, -b-0.1, 1.0, 1.0, 1.0, "2" )
dxPrint( 1.0+0.1, -c-0.1, -b-0.1, 1.0, 1.0, 1.0, "3" )
dxPrint( 0.0+0.1, -c-0.1, d+0.1, 1.0, 1.0, 1.0, "4" )
dxSetRenderState( D3DRS_CULLMODE, D3DCULL_CCW )
end
Tetrahedron = Figure.new( function()
tetrahedron()
end )
E = Transformation.new( function()
end )
R1 = Transformation.new( function()
Rotate( 120.0, 0.0, 0.0, 1.0 )
end )
R2 = Transformation.new( function()
Rotate( 120.0, -1.0, -b, -c )
end )
R3 = Transformation.new( function()
Rotate( 120.0, 1.0, -b, -c )
end )
R4 = Transformation.new( function()
Rotate( 120.0, 0.0, d, -c )
end )
T1 = Transformation.new( function()
Translate( 3.0, 0.0, 0.0 )
end )
T2 = Transformation.new( function()
Translate( 0.0,-3.0, 0.0 )
end )
draw = E * Tetrahedron
draw = ( T1 * R1 ) * Tetrahedron
draw = ( T1^2 * R1^2 ) * Tetrahedron
draw = ( T1 * T2 * R2 ) * Tetrahedron
draw = ( T1^2 * T2 * R2^2 ) * Tetrahedron
draw = ( T1 * T2^2 * R3 ) * Tetrahedron
draw = ( T1^2 * T2^2 * R3^2 ) * Tetrahedron
draw = ( T1 * T2^3 * R4 ) * Tetrahedron
draw = ( T1^2 * T2^3 * R4^2 ) * Tetrahedron
draw = ( T1^4 * R2^2 * R1 ) * Tetrahedron
draw = ( T1^4 * T2 * R4^2 * R2 ) * Tetrahedron
draw = ( T1^4 * T2^2 * R2^2 * R3 ) * Tetrahedron
tnNewObject()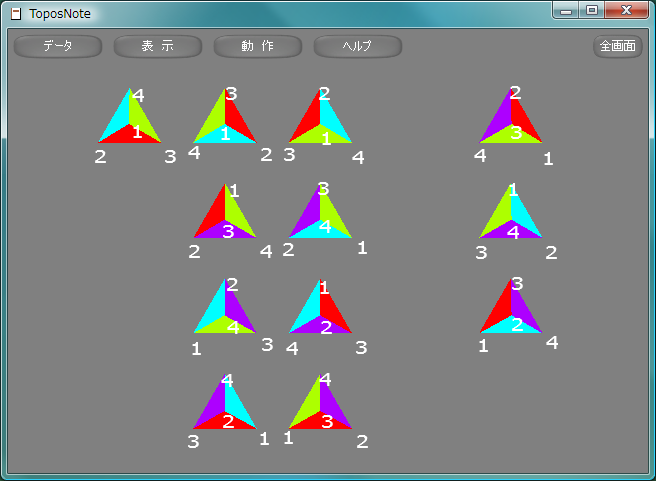
これ以外の対称変換は鏡映と回転の積で表現されます。
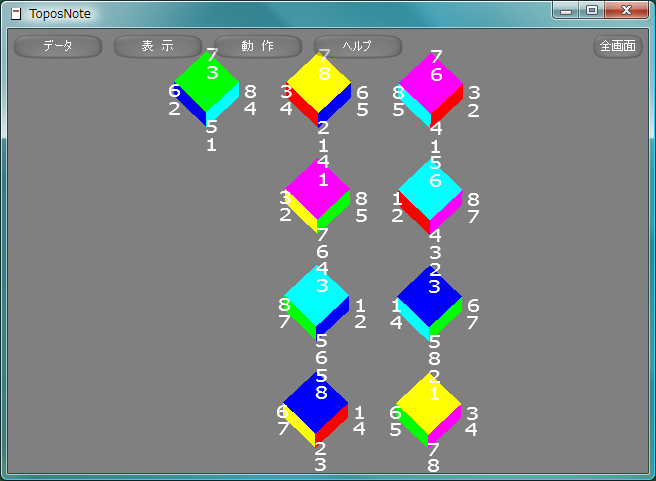
立方体の対称変換で回転で表現できるものは、4本の対角線の置換として表現するができて、そのすべての組み合わせに対応する回転が存在することから、対称群S4に同型であることがわかります。そのすべてを図示します。
package.path = "std/?.lua"
require( "Geometry" )
a = math.sqrt( 3.0 ) / 3.0
vertices = {
-a, -a, -a, -a, -a, -a, 0.0, 0.0,
-a, -a, a, -a, -a, a, 0.0, 0.0,
a, -a, a, a, -a, a, 0.0, 0.0,
a, -a, -a, a, -a, -a, 0.0, 0.0,
-a, a, -a, -a, a, -a, 0.0, 0.0,
-a, a, a, -a, a, a, 0.0, 0.0,
a, a, a, a, a, a, 0.0, 0.0,
a, a, -a, a, a, -a, 0.0, 0.0
}
function cube()
dxSetRenderState( D3DRS_CULLMODE, D3DCULL_NONE )
dxSetColorHSV( 0.0, 1.0, 1.0 )
dxTriangleMesh( 8, vertices, 2, { 0, 1, 2, 0, 2, 3 } )
dxSetColorHSV( 60.0, 1.0, 1.0 )
dxTriangleMesh( 8, vertices, 2, { 1, 5, 6, 1, 6, 2 } )
dxSetColorHSV( 120.0, 1.0, 1.0 )
dxTriangleMesh( 8, vertices, 2, { 5, 4, 7, 5, 7, 6 } )
dxSetColorHSV( 180.0, 1.0, 1.0 )
dxTriangleMesh( 8, vertices, 2, { 4, 0, 3, 4, 3, 7 } )
dxSetColorHSV( 240.0, 1.0, 1.0 )
dxTriangleMesh( 8, vertices, 2, { 0, 4, 5, 0, 5, 1 } )
dxSetColorHSV( 300.0, 1.0, 1.0 )
dxTriangleMesh( 8, vertices, 2, { 2, 6, 7, 2, 7, 3 } )
dxPrint( -a-0.1, -a-0.1, -a-0.1, 1.0, 1.0, 1.0, "1" )
dxPrint( -a-0.1, -a-0.1, a+0.1, 1.0, 1.0, 1.0, "2" )
dxPrint( a+0.1, -a-0.1, a+0.1, 1.0, 1.0, 1.0, "3" )
dxPrint( a+0.1, -a-0.1, -a-0.1, 1.0, 1.0, 1.0, "4" )
dxPrint( -a-0.1, a+0.1, -a-0.1, 1.0, 1.0, 1.0, "5" )
dxPrint( -a-0.1, a+0.1, a+0.1, 1.0, 1.0, 1.0, "6" )
dxPrint( a+0.1, a+0.1, a+0.1, 1.0, 1.0, 1.0, "7" )
dxPrint( a+0.1, a+0.1, -a-0.1, 1.0, 1.0, 1.0, "8" )
dxSetRenderState( D3DRS_CULLMODE, D3DCULL_CCW )
end
Cube = Figure.new( function()
cube()
end )
E = Transformation.new( function()
end )
R1 = Transformation.new( function()
Rotate( 90.0, 1.0, 0.0, 0.0 )
end )
R2 = Transformation.new( function()
Rotate( 90.0, 0.0, 1.0, 0.0 )
end )
R3 = Transformation.new( function()
Rotate( 90.0, 0.0, 0.0, 1.0 )
end )
T1 = Transformation.new( function()
Translate( 2.0,-2.0, 0.0 )
end )
T2 = Transformation.new( function()
Translate(-2.0,-2.0, 0.0 )
end )
draw = E * Cube
draw = ( T1 * R1 ) * Cube
draw = ( T1^2 * R1^2 ) * Cube
draw = ( T1^3 * R1^3 ) * Cube
draw = ( T1 * T2 * R2 ) * Cube
draw = ( T1^2 * T2 * R2^2 ) * Cube
draw = ( T1^3 * T2 * R2^3 ) * Cube
draw = ( T1 * T2^2 * R3 ) * Cube
draw = ( T1^2 * T2^2 * R3^2 ) * Cube
draw = ( T1^3 * T2^2 * R3^3 ) * Cube
tnNewObject()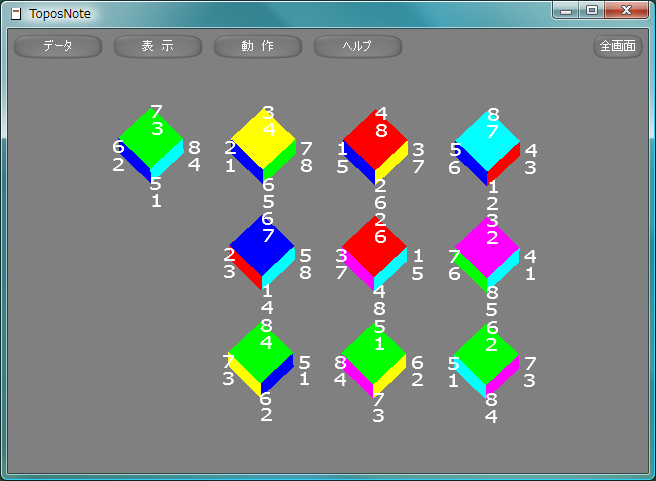
R4 = Transformation.new( function() Rotate( 120.0, a, a, a ) end ) R5 = Transformation.new( function() Rotate( 120.0, a,-a, a ) end ) R6 = Transformation.new( function() Rotate( 120.0,-a,-a, a ) end ) R7 = Transformation.new( function() Rotate( 120.0,-a, a, a ) end ) T1 = Transformation.new( function() Translate( 2.0,-2.0, 0.0 ) end ) T2 = Transformation.new( function() Translate(-2.0,-2.0, 0.0 ) end ) draw = E * Cube draw = ( T1 * R4 ) * Cube draw = ( T1^2 * R4^2 ) * Cube draw = ( T1 * T2 * R5 ) * Cube draw = ( T1^2 * T2 * R5^2 ) * Cube draw = ( T1 * T2^2 * R6 ) * Cube draw = ( T1^2 * T2^2 * R6^2 ) * Cube draw = ( T1 * T2^3 * R7 ) * Cube draw = ( T1^2 * T2^3 * R7^2 ) * Cube
R8 = Transformation.new( function() Rotate( 180.0, a, 0.0, a ) end ) R9 = Transformation.new( function() Rotate( 180.0, 0.0, a, a ) end ) Ra = Transformation.new( function() Rotate( 180.0,-a, 0.0, a ) end ) Rb = Transformation.new( function() Rotate( 180.0, 0.0,-a, a ) end ) Rc = Transformation.new( function() Rotate( 180.0, a, a, 0.0 ) end ) Rd = Transformation.new( function() Rotate( 180.0,-a, a, 0.0 ) end ) T1 = Transformation.new( function() Translate( 2.0,-2.0, 0.0 ) end ) T2 = Transformation.new( function() Translate(-2.0,-2.0, 0.0 ) end ) draw = E * Cube draw = ( T1 * R8 ) * Cube draw = ( T1^2 * R9 ) * Cube draw = ( T1^3 * Ra ) * Cube draw = ( T1^4 * Rb ) * Cube draw = ( T1 * T2 * Rc ) * Cube draw = ( T1^2 * T2 * Rd ) * Cube
これ以外の対称変換は鏡映と回転の積で表現されます。
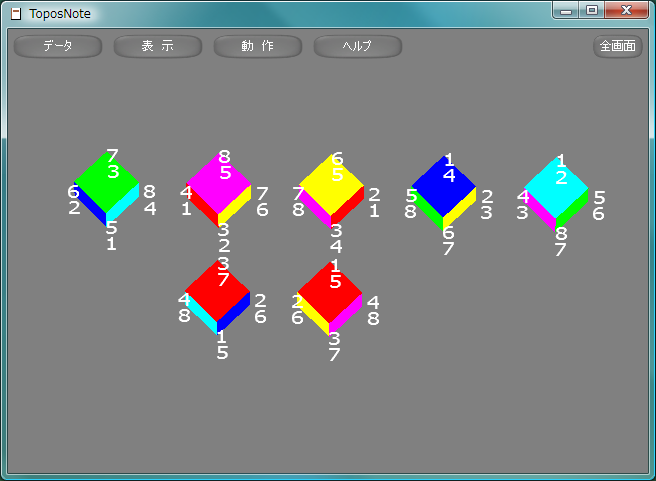
下図のように正八面体を立方体に内接させると、正八面体の頂点と立方体の面、正八面体の面と立方体の頂点が1対1に対応します。この性質から、正八面体と立方体の対称変換群は同じものであることがわかります。
正十二面体は、正八面体と立方体の対応と同じように正二十面体と対応します。
正二十面体の対称変換群の構造を決定し、それを視覚的に表現することはかなり長くなるので現段階では省略し、結果だけを記しておきます。これについては参考文献[4]を参照してください。
証明
略■定理2.3.6.4 合同変換群の有限部分群の分類
合同変換群の有限部分群は巡回群、正二面体群、そして正多面体の対称変換群に限る。証明
略■




Published by SANENSYA Co.,Ltd.